Safe and efficient mobility
Technology is developing at lightning speed. Every year the number of computer chips in new trucks and passenger cars increases and modern cars can best be described as driving computers. The benefits of applying new technological innovations are evident: a lot of profit can still be achieved in the logistics sector through greater efficiency. And in the passenger car market there is still a lot to be gained in terms of comfort and safety. TNO is at the forefront of the development of the latest technology for use in the automotive sector. Why? Because mobility can be more efficient, more comfortable and, above all, safer.

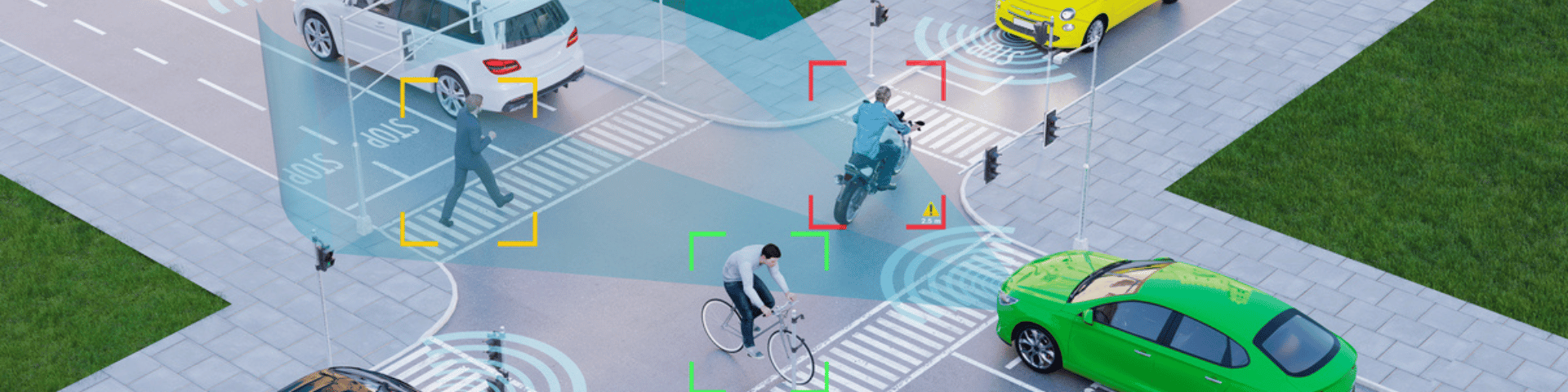
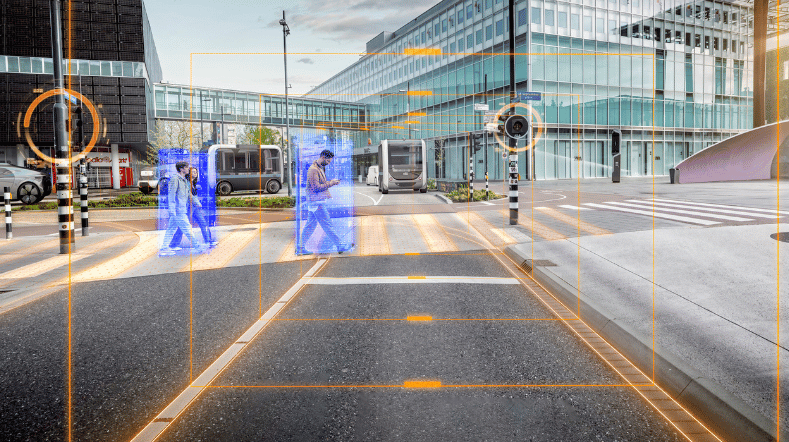
Vehicle automation
The truck driver who is allowed to get out upon arrival in the port area. Further maneuvering, unloading and reloading is automated. The bus driver drives his shift to the depot, gets out and goes home. Washing, parking and driving the buses the next day takes place without human intervention. And finally, the commuter who hits the brakes just too late on a wet road surface will be fine: his smart car tires had already activated the braking system. Some examples where modern technology leads to great advantages in traffic. And the great thing is: this is reality.
However, application of technology in the 'real world' is exceptionally complex. In addition to in-depth knowledge of vehicle automation and AI, knowledge about, for example, human behavior, infrastructure, legislation and economic logistics also play a significant role. Within TNO, more than 4,000 scientists from all required disciplines work together every day. On the one hand, this is necessary to successfully implement technological breakthroughs in the logistics and automotive sector.
And on the other hand, this collaboration 'under one roof' leads to shorter lead times and lower costs for our customers. This breadth in areas of expertise in combination with in-depth scientific knowledge makes TNO unique. We work as a director to get new technologies on the road and as a partner to build a sustainable competitive advantage with distinctive innovations.
Our phased approach, which often includes a proof-of-concept, also means that you know in advance where you stand.
Our impact
-
Future Proof Smart Logistics

In cooperation with
logistics partners, shippers, IT parties, and governments.
-
CAT4Yards: Next step in development connected automated transport in the Netherlands

In cooperation with
DPD, Verbrugge, Elopak, Terberg and more
-
Accurate and reliable localisation

-
Cost-efficient Yard Automation Solutions (CEYAS)

-
DITM: Digital Infrastructure for Future-proof Mobility
Status project
1 October 2022 - 1 October 2026
In cooperation with
Siemens, VDL, Heliox, TomTom, NXP and more
-
PLATO shows logistics the way in digital platforms

Status project
2022-2023
In cooperation with
Smartport, Evofenedex, Bigmile, Port of Rotterdam, ...
-
StreetWise: scenario based safety assessment for automated driving
In cooperation with
Siemens, AVL, Daimler Truck
-
Catalyst: making road transport more sustainable with connected automated transport

In cooperation with
Partners from business, public authorities, and knowledge ...
-
Platooning is positive for traffic, the environment and the wallet
-
Mobility in the future: safely from A to B with IT security
-
Pilot Autonomous Algorithms
In cooperation with
In cooperation with logistieke partijen, verladers, IT ...
Our latest developments
Releasing autonomous software faster with DeepScenario and TNO’s StreetWise

MARQ opens its doors: a place to collaborate on the mobility of the future
Demonstrations of automated driving and charging for logistics at Maasvlakte

Getting on board with autonomous transport? Five things you need to know

Connected mobility

Contact us
-
Martijn Stamm
Functie:Market DirectorI am Martijn Stamm, the Director of Mobility at Mobility & Built Environment Unit. As Director of Mobility, my goal is to define and develop national and international projects, public-private partnerships with industrial and governmental partners, in support of the Unit's propositions in Safe & efficient mobility, Sustainable mobility, and Safe & sustainable maritime & offshore.
-
Standplaats:Helmond - Automotive Campus
-
Email:Email Martijn
-
-

Henk Goossens
Functie:Innovation Partnerships ManagerMy mission is responsible introduction and adoption of automated driving. Automation of vehicles has a lot of societal and economic advantages. The technology for automated driving is incredibly complex and therefore has the risk of not being safe enough.
With my colleagues at TNO we are developing methodologies, systems and software that provide solutions for assessing and reducing the safety risk in a thorough and fundamental way. I appreciate the underlying high tech solutions in mathematics and (system) engineering. Even more though, I enjoy brining those solutions to our partners for implementation in their processes and vehicles.
-
Standplaats:Helmond - Automotive Campus
-
Email:Email Henk
-
LinkedIn:Henk on LinkedIn
-