DITM: Digital Infrastructure for Future-proof Mobility
Status project
1 October 2022 - 1 October 2026
In cooperation with
Siemens, VDL, Heliox, TomTom, NXP and more
DITM is a National Growth Fund project subsidised by the Dutch government. Within this project TNO is working with partner companies to implement the digital infrastructure for automated transport, with the aim of making mobility safer and more efficient.
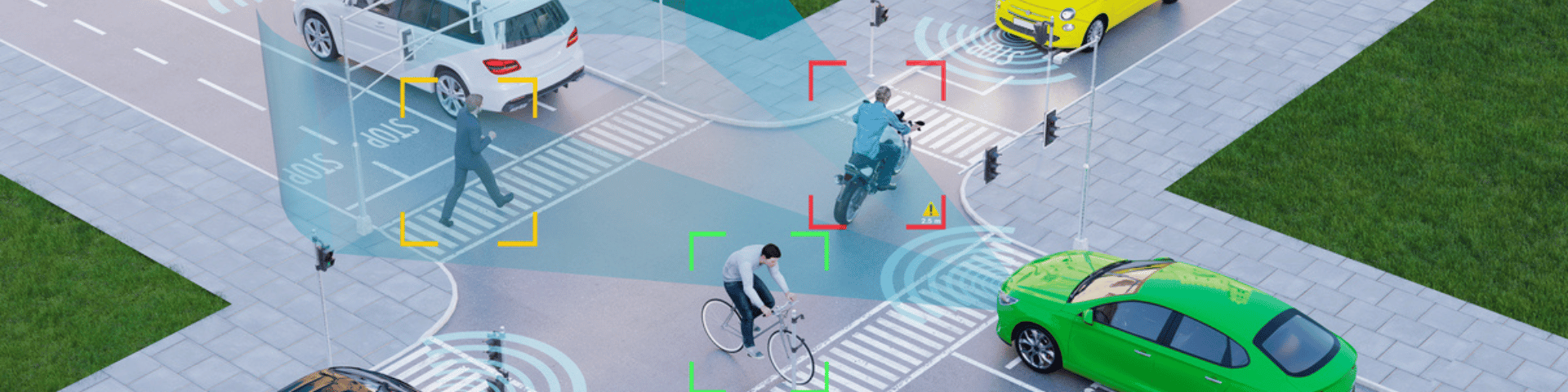
Cooperative, Connected en Automated Mobiliteitssysteem (CCAM)
The consortium (19 partners) combines expertise from various fields, bringing together developments from the automotive industry, ICT, traffic management, and mobility innovation. Its goal is to create a Cooperative, Connected, and Automated Mobility System (CCAM) that is safe, effective, cyber-secure, scalable, and brand-independent.
System architecture for a digital infrastructure
To this end, the DITM project is developing a system architecture for a digital infrastructure, including key technologies such as localisation, traffic services, digital maps, and charging infrastructure.
Working on the basis of a desired system solution, this will make it possible to achieve scale and realise an important export product for Dutch industry. This is in line with the mission-driven innovation policy of working towards improved road safety (zero road deaths), zero emissions, and better accessibility and quality of life.
Validation Lab supports informed choices about CCAMs
Within the consortium TNO is leading the ‘Validation Lab’, the aim of which is to achieve:
- Cheaper – and shorter development times for – innovations and CCAM applications, thereby speeding up and easing implementation;
- Validation and optimisation of urban design issues before actual implementation;
- Policy and regulatory advice. This component involves specifying, designing, implementing, and verifying a ‘Validation Lab’ within which CCAM applications are tested and validated. The Validation Lab consists of a virtual simulation and a physical test environment, including the A270 test road (a real-life test environment several kilometres in length, equipped with cameras, transponders, and Wi-Fi beacons, all connected to a high-end control room, the Traffic Innovation Centre), the Fabulos route (self-driving minibus), and intelligent intersections.
- The virtual part of the Validation Lab comprises microscale simulations (digital twin). On the other hand, the Validation Lab will also provide macroscale simulation tools to validate the impact of the developed technologies and energy-system and CCAM applications at a larger scale (city, region, and country).
Developed by partner organisation Siemens, the platform covers the entire development cycle, including data collection, simulations, and validation of CCAM vehicles.
Unique project in the world
To scale up CCAM applications, clear frameworks, standards, and guidelines are needed. This could hinder the development of new applications and services that contribute to safer traffic and new business models. Road infrastructure stands at the interface of sectors that have not often worked together in the past. The DITM project partners are now working with national stakeholders to build a foundation consisting of a system architecture, a Validation Lab, and public-private partnership agreements.
Within DITM the 19 parties came together for the first time with the aim of taking an integrated approach to the issue. That is why the project is now succeeding and that is unique in the world.
Virtual and physical validation at the Mobility Applied Research Quarter
The Validation Lab will be based at MARQ (Mobility Applied Research Quarter). MARQ is a new, open innovation centre at the Automotive Campus in Helmond and will be opening its doors at the end of 2024. MARQ will play an important role in the collaboration between knowledge institutions, industry, and government. Furthermore, MARQ will offer partners the opportunity to test solutions in an optimally controlled way under ‘real-life’ conditions, in which vehicles are seen in the context of their environment. Not just functionally, but specifically to test the impact on society.

Contact us
-

Bastiaan Krosse
Function not known-
Standplaats:Helmond - Automotive Campus
-
Email:Email Bastiaan
-
-

Martijn Stamm
Functie:Market DirectorI am Martijn Stamm, the Director of Mobility at Mobility & Built Environment Unit. As Director of Mobility, my goal is to define and develop national and international projects, public-private partnerships with industrial and governmental partners, in support of the Unit's propositions in Safe & efficient mobility, Sustainable mobility, and Safe & sustainable maritime & offshore.
-
Standplaats:Helmond - Automotive Campus
-
Email:Email Martijn
-
Get inspired
Releasing autonomous software faster with DeepScenario and TNO’s StreetWise

MARQ opens its doors: a place to collaborate on the mobility of the future
Demonstrations of automated driving and charging for logistics at Maasvlakte

Getting on board with autonomous transport? Five things you need to know

Connected mobility
