
DITM drives Cooperative, Connected, and Automated Mobility in Europe
To make our mobility safer, more sustainable, and more efficient, industry and governments are steering towards Cooperative, Connected, and Automated Mobility (CCAM). The multidisciplinary DITM project consisting of 19 consortium partners will develop a system architecture for a digital infrastructure including the underlying critical core technologies related to localisation, traffic services, digital maps and charging infrastructure.
Nearly halfway through the project, the 19 consortium members showed significant progress during the DITM Day on 29 May, with a prominent role for TNO’s innovations in safe automated driving.
DITM (Digital Infrastructure for Future-Proof Mobility)
DITM (Digital Infrastructure for Future-Proof Mobility), funded by NextGenerationEU, the Dutch government and partners, aims to develop a safe, effective, cyber-secure, reliable, scalable, and brand-independent system architecture for a digital infrastructure that supports higher levels of Automated Driving (AD). Started in 2022, this joint research initiative combines expertise from the automotive industry, ICT, traffic management, and mobility innovation. Supervised by Brainport Development, the 19 project partners focus on:
- Developing autonomous functionalities;
- Creating an energy exchange system linking AD with electric vehicles (EV);
- Establishing a digital road infrastructure, including an innovative digital map production system;
- Implementing a Proof of Concept for a data-sharing environment; and
- Setting up a Validation Lab led by TNO to achieve cost-effective CCAM innovations and applications with shorter development times.
EC focus on Cooperative and Connected
On 29 May, the consortium organised the DITM Day, hosted by TNO at the Automotive Campus in Helmond, to showcase progress and highlight remaining challenges. The presence of Andrea De Candido, CCAM Policy Officer at the European Commission, underlined the significance of DITM for Europe’s future mobility.
De Candido stated, ‘Being here today is very relevant for understanding the level of advancements and the challenges on the path towards automated driving. The fact that DITM is fully focused on the digital infrastructure is very much welcomed on a European level. The European Commission recognises that to fully exploit the opportunities of CCAM, we have to ensure that vehicles are integrated into a wider ecosystem, making them Cooperative and Connected.’
Slower but solid implementation
De Candido emphasises that the European strategy for implementing automated driving is distinct and effective due to its balanced approach. ‘In the end, it’s about the balance between the vehicle making decisions and a solid digital infrastructure informing the vehicle. Our strategy differs from the rest of the world.’
‘The US has a bottom-up approach. Due to the lack of a precise regulatory driven approach, the US might be faster in initial deployment but their deployment is not necessarily there to stay forever. This reconfirms that our balanced, step-by-step approach is the most logical and effective one to follow.'
'It might be slower, but with regulation development and industrial development going hand in hand, we ensure that when we take a step forward, it’s in the right direction. Safety for us is the biggest precondition for any kind of deployment.’

‘This is a complex system innovation challenge that requires advancements not just in technology but also in regulation and the assessment framework.’
Filling in the technology gaps
Indeed, ensuring the safe and secure application of Automated Driving systems continues to be very challenging, acknowledges Bastiaan Krosse, Research Manager Integrated Vehicle Safety at TNO. ‘This is a complex system innovation challenge that requires advancements not just in technology but also in regulation and the assessment framework. That is what we aim to address as TNO in the DITM project. With our knowledge, we assist the industry by filling in the technology gaps. At the same time, we connect with authorities to ensure the technology will ultimately be deployed on public roads. Therefore, we must ensure that the results of the DITM project are shared and implemented in a harmonised way throughout Europe.’
Scalable and safe solution
The action-packed DITM Day program, featuring multiple technology deep-dives and live demos at the Automotive Campus grounds, clearly demonstrates the opportunities and challenges of an effective digital infrastructure.
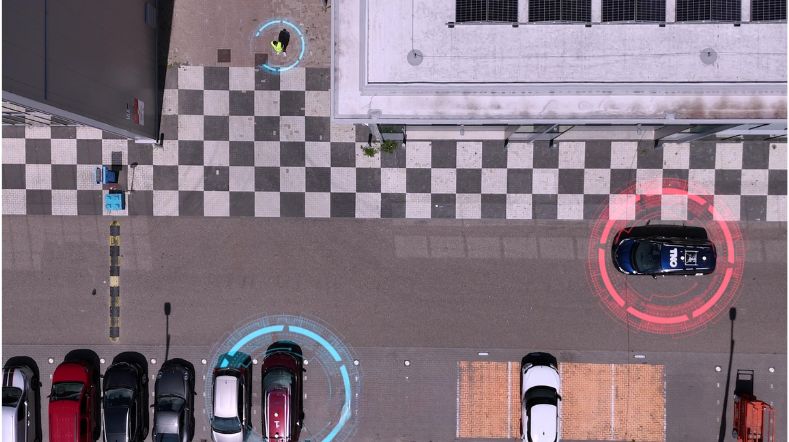
In his presentation and demos, Daniel Altgassen, Senior Systems Engineer at TNO, stressed the importance of having a digital infrastructure for scaling up the Operational Design Domain (ODD) of automated driving. Altgassen and his partners have identified and explored a wide range of localisation, detection, and planning technologies that contribute to the safety of automated vehicles.
‘By developing knowledge on each of these systems, TNO aims to develop a complete automated driving system that is scalable to several automation applications and traffic scenarios, while ensuring the safety of the occupants and other road users,’ Altgassen explained. With a compelling bus depot and Ultra-Wide Band demonstration, next to an Intelligent Speed Assist demo, TNO effectively put theory into practice.

‘This is not only true for the higher levels of autonomous driving, but also for all the ADAS (Advanced Driver Assistance Systems) that are already on our roads today.’
Digital infrastructure and dynamic data
Peter-Paul Schackmann, Senior Project Manager at TNO, also addressed the importance of a solid digital infrastructure for CCAM in his presentation. ‘This is not only true for the higher levels of autonomous driving, but also for all the ADAS (Advanced Driver Assistance Systems) that are already on our roads today. These systems all rely on in-built sensors and are therefore far from perfect. A digital road infrastructure (DRI) is essential as a reliable source of information for CCAM.’
‘Therefore, in DITM, TNO and its partners are exploring the requirements for an effective and safe DRI, with a focus on data, connectivity and data sharing ecosystems. The added value of a DRI and the use of different data sources, from static to highly dynamic, has been demonstrated for Intelligent Speed Assist (ISA). The accuracy and effectiveness of this mandatory feature for new vehicles, which displays local speed limits, is significantly improved by using data from road operators.’
The power of virtual simulation
Scaling up automated driving in a safe and secure way depends not only on the technology of the vehicle itself and having the right digital infrastructure, but also on the safety assessment of automated driving systems.
Wiljan Willems, Senior Programme Manager at TNO: ‘Traditional physical testing methods, while invaluable, are inherently limited. Testing AVs on public roads can expose them to a wide range of real-world conditions, but it is impractical and unsafe to encounter and test every possible scenario. In addition, physical testing is time-consuming, expensive and subject to regulatory and logistical constraints.’
Limitations that TNO is addressing with virtual simulation. ‘In DITM, we are developing both a virtual and a physical testing framework, including tools for data collection and sharing. We have named this set of specialised frameworks 'ValidationLab'. It provides a comprehensive framework for verifying and validating CCAM applications and services through an in-depth assessment of specific scenarios, either through simulation, real-world testing or a combination of both.’

‘The second half of this project should focus on sharing the results with all stakeholders so that they know that these are the solutions we are working towards in Europe.’
Pioneering role for the Dutch
After the demonstrations, Andrea De Candido takes the opportunity to reflect on DITM Day. ‘What you are doing here with DITM is a significant contribution to the overall development of CCAM in Europe. What I like is that there are very clear objectives and a clear plan on how to achieve these objectives. The activities within DITM are closely aligned with the European Commission's direction in the transition to automated driving.’
‘The Netherlands is already playing an important role in driving CCAM in Europe, both in terms of technology development and research, but also looking very closely at the regulatory and policy level. This knowledge is very helpful for other countries and Europe as a whole to decide what is the best approach. That's why my recommendation would be to make sure that the positive experiences from DITM are not limited to the Netherlands, but that they are made as visible as possible at a European level, so that everyone can benefit from them.’
Bastiaan Krosse agrees and adds: ‘The second half of this project should focus on sharing the results with all stakeholders so that they know that these are the solutions we are working towards in Europe. This project clearly demonstrates that public and private parties have a joint task to come up with impactful solutions. CCAM will happen, it’s inevitable. Therefore, we have to make sure that CCAM matches our European values.’

DITM project
The DITM project will run until 1 October 2026, and the 19 consortium members will meet again this autumn for a follow-up event.
Meet our experts


Contact us
-

Fast Access Office
Functie:Contact usDo you have a question or are you looking for the right expert directly? We quickly connect you with the right specialist and support you with validation questions, technological developments, and access to our advanced lab infrastructure.
Consumer inquiries fall outside our specific area of expertise, we're happy to assist you with other questions.
-
Standplaats:Den Haag - New Babylon
-
Email:Email Fast Access Office
-
Get inspired
Innovation Matters: TNO and Plantanious organise logistics for greater delivery reliability

Automated driving: from smarter speed advice to depot automation for buses
Self-organising logistics

Shared logistics requires new forms of collaboration
How is YER award winner Chris van der Ploeg doing?
