Objectieve veiligheidsrating van autonome voertuigen dichterbij
Hoe kunnen we straks objectief vaststellen of een zelfrijdend voertuig veilig is of niet? Het onderzoek van TNO-wetenschapper Erwin de Gelder naar het gebruik van realistische rijscenario’s bij de veiligheidsvalidatie van autonome voertuigen heeft daar een belangrijke bijdrage aan geleverd.
Hoewel er nu al auto’s te koop zijn met geavanceerde rijhulpsystemen, duurt het nog jaren voor voertuigen volledig zelfstandig rondrijden, verwacht Erwin de Gelder, scientist bij TNO. De afgelopen jaren werkte hij aan diverse onderzoeken op het gebied van zelfrijdende voertuigen, zowel aan de technologie van de voertuigen zelf, als aan de testmethodes.
“Voor alle duidelijkheid: zelfrijdende voertuigen bestaan al geruime tijd, maar bij de huidige autonome voertuigen is de mens nog steeds verantwoordelijk voor de rijtaak. De mate waarin een voertuig autonoom kan rijden, wordt geclassificeerd met de levels 0 tot en met 5. Tot level 3 wordt de bestuurder geholpen met bijvoorbeeld remmen, gas geven, of sturen, maar de mens blijft altijd eindverantwoordelijk. Vanaf level 3 ligt de verantwoordelijkheid bij het voertuig, dat dus zelf heel veel situaties moet kunnen oplossen. En daar zit nu net het probleem.”
Probleemoplossend vermogen autonoom voertuig
Een fietskoerier die door het verkeer zigzagt, een voetganger die plots blijft staan, een hond die oversteekt. Iedereen die wel eens in een drukke stad heeft gereden, weet hoe groot het probleemoplossend vermogen van een autonoom rijdend voertuig moet zijn. “Er zijn miljoenen verkeerssituaties. Dus hoe kunnen we van tevoren weten of een voertuig daar goed mee om kan gaan?”
Erwin de Gelder ontdekte al snel dat de huidige manier van testen veel te beperkt is, omdat praktijktests en ongevallenstatistieken te weinig rijsituaties opleveren. “Daarom hebben we onderzocht hoe we data van meerdere vloten voertuigen kunnen gebruiken om veel meer situaties te verzamelen.”
"Er zijn miljoenen verkeerssituaties. Dus hoe kunnen we van tevoren weten of een autonoom voertuig daar goed mee om kan gaan?"
Verkeersscenario’s uit echte rijgegevens
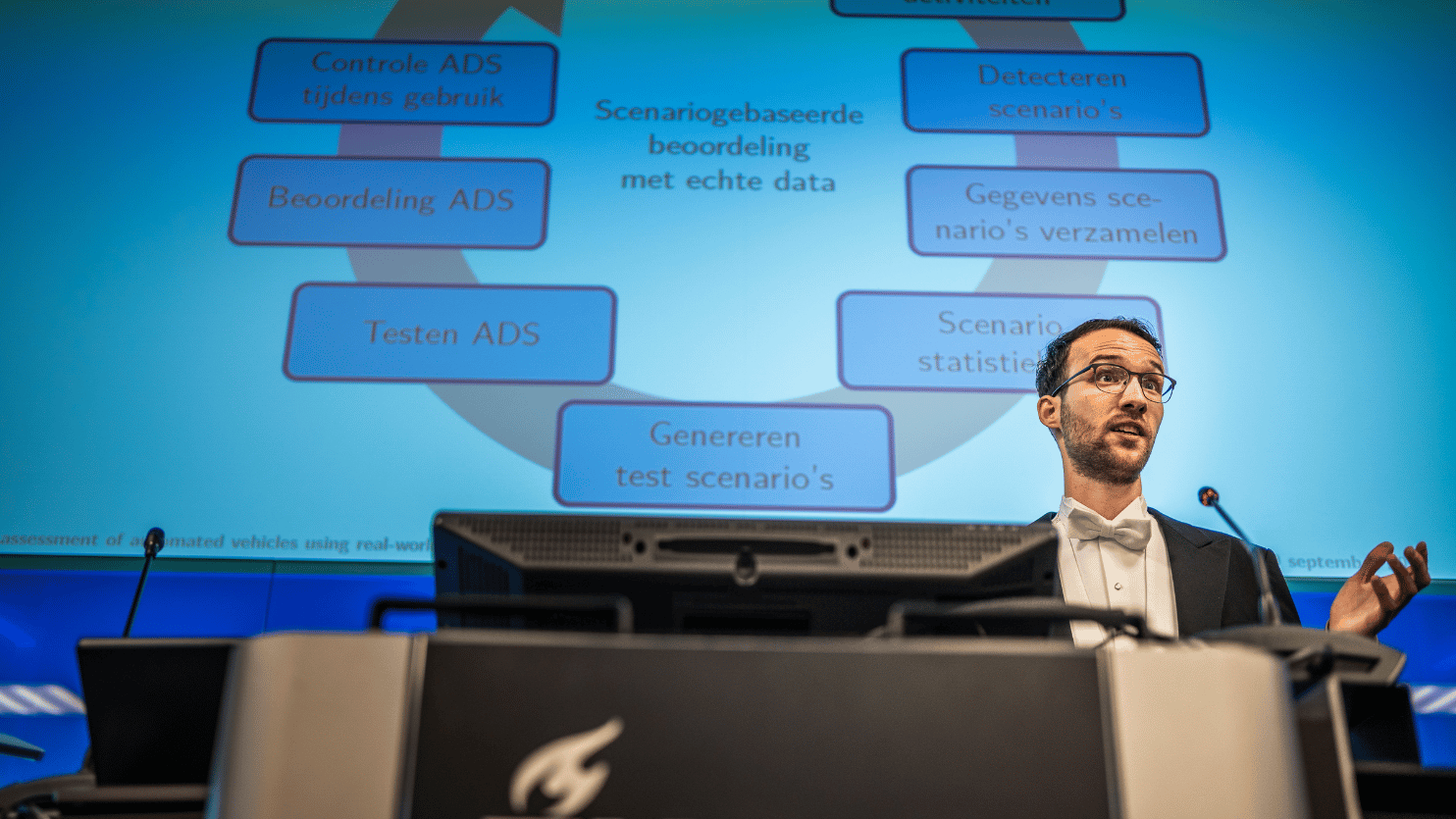
De door TNO ontwikkelde StreetWise-methodologie destilleert scenario’s uit echte rijgegevens. Die scenario’s worden vervolgens gebruikt om tests te ontwikkelen: voor simulatiesoftware of op een testbaan. Erwin de Gelder: “Een groot voordeel is bovendien dat we met deze methodologie ook nog onbekende situaties in kaart kunnen brengen. Want we kennen nog heel veel situaties niet. Bovendien: ieder land waar we nog niet getest hebben, heeft weer afwijkende infrastructuur en specifieke uitdagingen. Met lokale data kun je deze methodologie overal ter wereld gebruiken.”
Objectief veiligheidsoordeel autonome voertuigen
Niet alleen het zo grondig mogelijk kunnen valideren van de veiligheid van autonome voertuigen was de uitdaging voor TNO, ook het objectief kunnen kwantificeren van die veiligheid. “Tot nu toe zat er bij het testen van veiligheidssystemen altijd een bepaalde mate van subjectiviteit. De persoon die beoordeelt, maakt een eigen inschatting van de risico’s. Bij kleine systemen zoals veiligheidsgordels en airbags werkt dat prima. Maar de complexiteit van zelfrijdende voertuigen vraagt om een neutrale, kwantitatieve veiligheidsrating.”
“Met de StreetWise methodologie kunnen we straks in één cijfer uitdrukken hoe veilig een zelfrijdend voertuig is. Daarmee kun je ook vergelijkingen maken met ongevallenstatistieken. Essentieel voor de industrie, maar natuurlijk ook voor beleidsmakers, wetgevers en keuringsinstanties.”
"Torc wil de StreetWise-methodologie van TNO gebruiken om te bepalen of hun technologie voor autonome trucks veilig genoeg is."
Autonome trucks worden StreetWise
De resultaten die TNO met StreetWise boekte, bleven niet lang onopgemerkt. “In gesprekken met bedrijven en overheden kregen we steeds weer bevestigd hoe belangrijk zo’n objectieve veiligheidsvalidatie is.” Een toonaangevende partij die al snel interesse toonde in samenwerking was Torc Robotics. De Amerikaanse dochteronderneming van Daimler Trucks heeft ruim 17 jaar ervaring met zelfrijdende voertuigen en geldt als een van de pioniers.
Momenteel richt Torc zich op het commercialiseren van autonome vrachtwagens voor lange afstanden in de VS. “Torc wil de StreetWise-methodologie gebruiken om te bepalen of hun technologie voor autonome trucks veilig genoeg is. Daarbij werken we samen aan het implementeren van onze software in de vlootoperatie van Torc. Ze gebruiken de software om de dagelijkse stroom data uit de testvloot te analyseren. Dat geeft hun engineers nieuwe inzichten, en we leren er zelf ook veel van. We willen nog beter alle scenario’s in kaart kunnen brengen en de onzekerheden verder verkleinen.”
Onderzoek wetgeving en standaardisatie autonoom rijden
Volgens Erwin de Gelder bevestigt de partnership met Torc hoe waardevol dit onderzoek is. “Autonoom rijden kan ons verkeer en vervoer efficiënter, duurzamer en veiliger maken. Maar dat vraagt wel om wetgeving en standaardisatie binnen de industrie. Ik zie dit onderzoek als typisch een TNO-taak, omdat TNO een onafhankelijk onderzoeksinstituut is. We zitten tussen het bedrijfsleven en de overheid in. Bedrijven hebben altijd een commercieel belang, wat het moeilijk maakt om onpartijdig te blijven. TNO heeft een unieke onafhankelijke positie om te kunnen aantonen of een voertuig echt veilig genoeg is. Dat onderzoek dient een groter maatschappelijk doel.”
Volgens De Gelder is dat onderzoek nog lang niet klaar. “Samen met Torc en potentiële partners willen we nog meer kennis en ervaring opdoen om uiteindelijk zo goed en objectief mogelijk de veiligheid van autonome voertuigen te kunnen vaststellen. Dat is onze missie.”
Neem contact met ons op
-

Henk Goossens
Functie:Innovation Partnerships ManagerMijn missie is de verantwoorde introductie en adoptie van automatisch rijden. Het automatiseren van voertuigen heeft een groot aantal maatschappelijke en economische voordelen. De technologie is echter ongelooflijk complex en dat brengt een veiligheidsrisico met zich mee. Samen met mijn collega’s bij TNO ontwikkelen we methodologieën, systemen en software die oplossingen bieden voor het beoordelen en verkleinen van het veiligheidsrisico.
-
Standplaats:Helmond - Automotive Campus
-
E-mail:E-mail Henk
-
LinkedIn:Henk op LinkedIn
-
Laat je verder inspireren
Veiligheidsvalidatie geautomatiseerd rijden

Scenario-based valideren ALKS is essentiële stap richting automated driving
Torc Robotics gebruikt TNO’s StreetWise om veiligheid van autonoom transport te valideren
