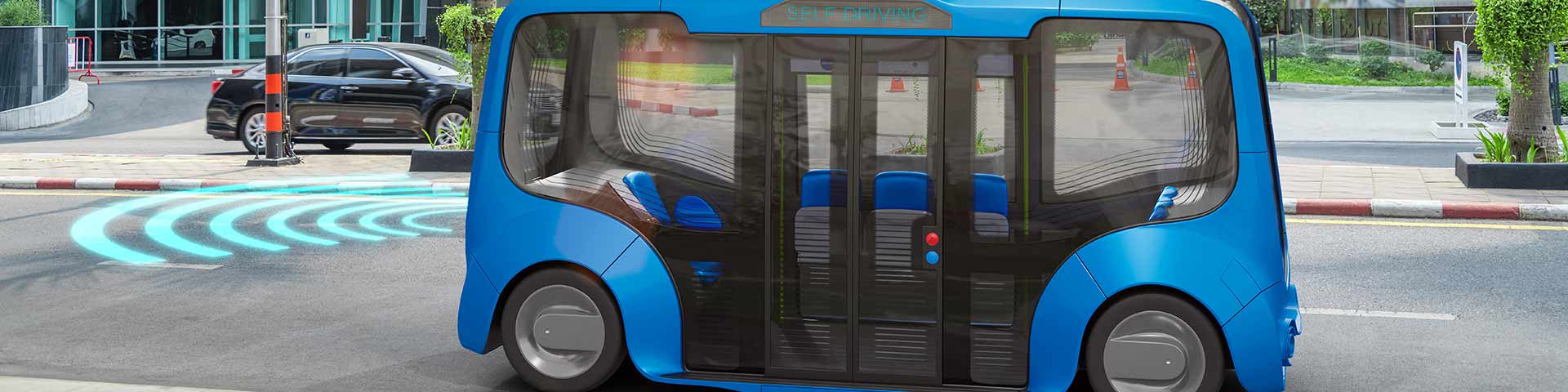
Autonome shuttles met context-afhankelijk gedrag
Automatisch rijden heeft de potentie om het verkeer veiliger, schoner en efficiënter te maken. Autonome shuttles zijn bijvoorbeeld belangrijk voor toegankelijk, duurzaam en veilig openbaar vervoer in onze toekomstige steden. Voor veilige en efficiente autonome voertuigen is het belangrijk dat ze kennis hebben van de situatie waarin ze zich bevinden en hun gedrag hierop aanpassen. Vandaar dat TNO, in samenwerking met andere partijen, een route-/padplanner voor autonome shuttles heeft ontwikkeld die voorzien is van omgevingsbewustzijn.
Uitdagingen shuttle vervoer met regel-gebaseerde systemen
De huidige generatie geautomatiseerde shuttles rijden vaak op basis van vast voorgeschreven regels: ze mogen hun vaste pad niet verlaten en moeten stoppen voor elk object wat gedetecteerd wordt op het pad. Hoewel dit heel veilig is, is het ook oncomfortabel voor de passagiers.
De shuttle zal regelmatig stoppen als het niet nodig is, bijvoorbeeld voor een hoop bladeren. Bovendien, wanneer er een auto op de rijbaan geparkeerd staat, kan de shuttle niet zelfstandig van zijn pad afwijken om er omheen te rijden.
Uitdaging van shuttle vervoer met data-lerende AI-algoritmes
Tegenover deze regel-gebaseerde systemen staan data-lerende AI-algoritmes. Die zorgen ervoor dat voertuigen een groot deel van de besturing voor hun rekening kunnen nemen. Dat is zeker een vooruitgang op het vlak van comfort. Maar op het vlak van omgevingsbewustzijn schieten deze systemen voor autonoom rijden nog tekort.
Dat bleek ook wel uit het rapport ‘Wie stuurt?’ van de Onderzoeksraad voor Veiligheid. Daarin worden diverse ongevallen beschreven van de huidige generatie voertuigen met automatiseringsfuncties. Het rapport maakte duidelijk dat ongevallen regelmatig optraden in situaties waarin de automatiseringsfuncties niet competent waren.
Context-afhankelijk
TNO probeert het beste van deze twee werelden te combineren met hybride AI. De route-/padplanner maakt gebruik van omgevingsbewustzijn om met behulp van zowel voorgeschreven kennis als geleerde kennis uit data te bepalen welk gedrag er gewenst is in de actuele context.
De planner neemt de onzekerheid en de risico's mee om bijvoorbeeld een pad te plannen om een obstakel heen, of om te stoppen omdat er een voertuig uit de andere rijrichting komt.
De route/pad planner is getest in meer dan 400 simulaties. Hierin werd door de context-afhankelijke planner een goede balans tussen veiligheid en comfort gekozen. Dit gaan we nu ook in de echte wereld testen met tests op de testbaan.
Het mooie is: omgevingsbewustzijn is niet alleen relevant voor de automatisering van shuttles. Of het nu gaat om zelfrijdende auto’s, vrachtwagens, bussen, treinen of andere voertuigen: zij zijn straks allemaal comfortabeler en veiliger met de hybride AI die we nu ontwikkelen.
Neem contact met ons op
-

Freek Bomhof
Functie:Senior consultantIk ben Freek Bomhof, programmadirecteur van het AI-onderzoeksprogramma Appl.AI binnen TNO. In mijn opleiding (Elektrotechniek) werkte ik al aan beeldherkenning, een voorloper van AI. Daar ben ik verder mee gegaan (door handgeschreven adressen met de computer te lezen voor de postsortering bij KPN), waarna ik de opkomst van internet van dichtbij meemaakte en meteen gefascineerd raakte door de impact die digitalisering heeft op onze manier van werken en leven.
-
Standplaats:Den Haag - New Babylon
-
E-mail:E-mail Freek
-
Laat je verder inspireren
Systeemintegratie voor robots in kassen

AutoAdapt: zelflerende adaptieve systemen
Ontwikkeling morele modellen AI-systemen

Situational awareness bij robot hond
